I saw there is in driver of FANUC, axis is defined as
“variables”: {
“Axis”: {“datatype”: “float”, “size”: 6, “operation”: “read”},
does it means the driver can only get joints in GP1, max to 8, but no implemented yet to get joints in other group?
ie, in case of
GP1: robot 1-6 joints
GP2: railway 1 axis
GP3: positioner 2 axis
thank you in advance!
Hi Sheng,
We just reinstalled our lab computer so I don’t have access to and cannot test RoboGuide right now, will try to install it today.
The driver is done so that variables that can be accessed through the robot interface dll can be transferred to the emulation. However some modifications might need to be done in the robot controller component, to read the extra variable and convert it to a mechanical output port to send to the external axis. The public component for KUKA var proxy has external axes implemented, so the Fanuc one can be cloned and combined with the behavior from the Kuka controller.
What variable would the external axis value be found?
Hi Fabian
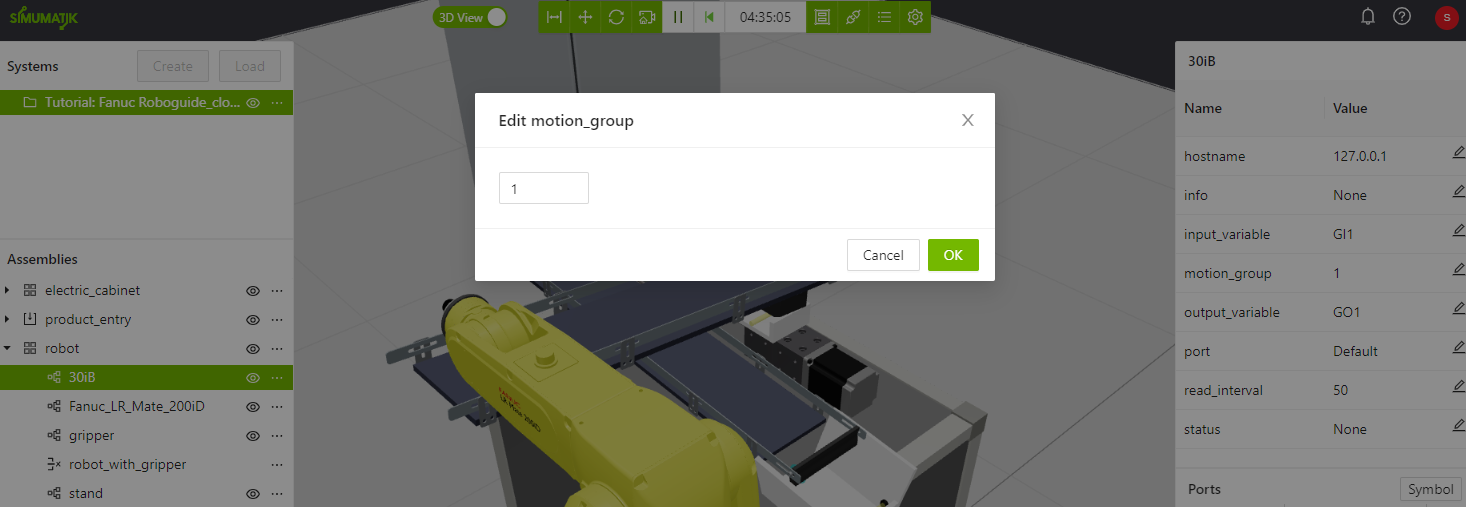
I found there is a parameter “motion_group” in one Fanuc controller, which was set as 1 in the tutorial:Fanuc Robot system.
I think I can added another controler in simumatik, connect to the same port of Roboguide, and set it as motion_group=2, as a workaround. RobotInterfaceDotNet.dll should work with this.
Yeah, that might be a good idea, please let me know if you got it to work!