Hi guys,
I followed the webinar “Building a component from scratch”, in order to create a similar application:
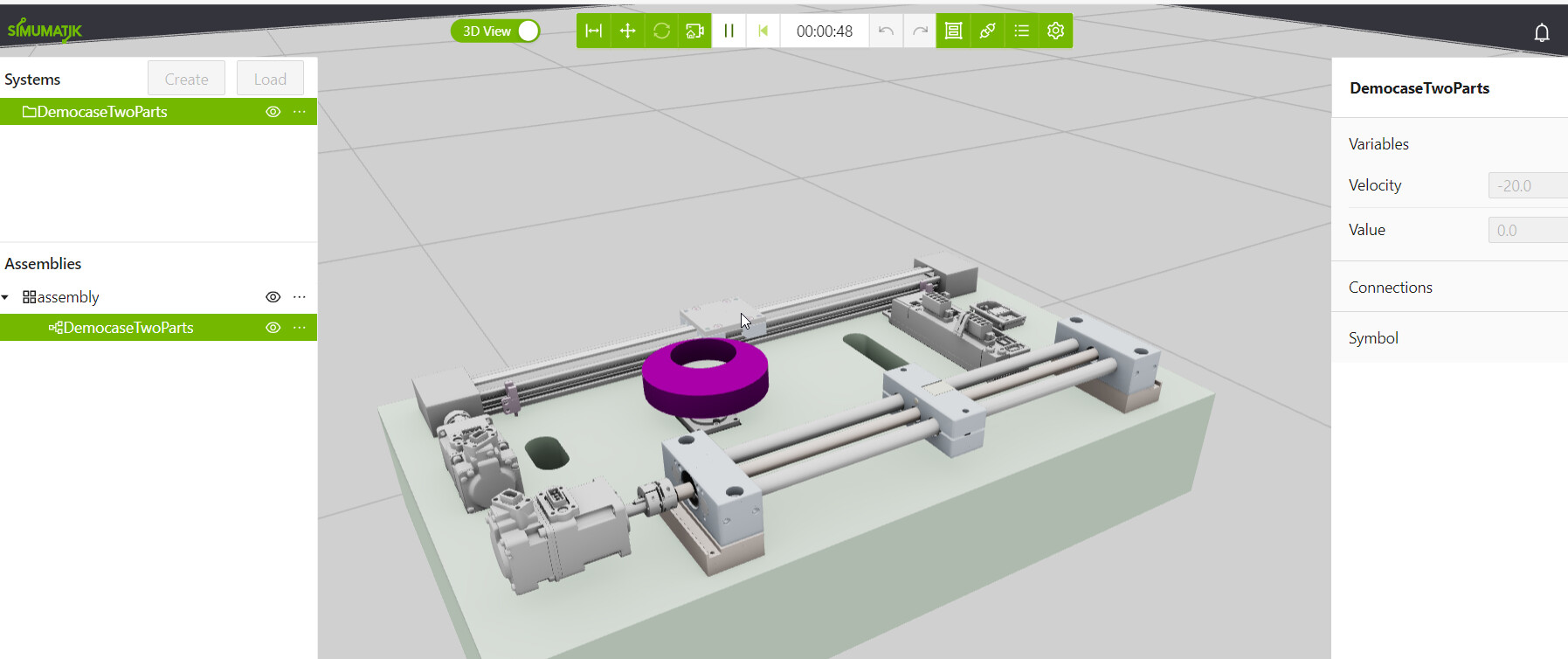
A “table” shall move on the “belt” in x direction. In the editor, i defined the “belt” as base_link and the “table” as link. I use a joint and joint motor for moving into x direction and a small behaviour script as told in the webinar.
As you can see, the output velocity is shown, but in the emulation the table is not moving at all.
Any hint, where the root cause might be? Is a collision tag or group maybe needed?
Thanks a lot for your help in advance!