I’m trying RoboDK, Integration.
https://academy.simumatik.com/courses/robodk-integration/module/integration-setup-3/
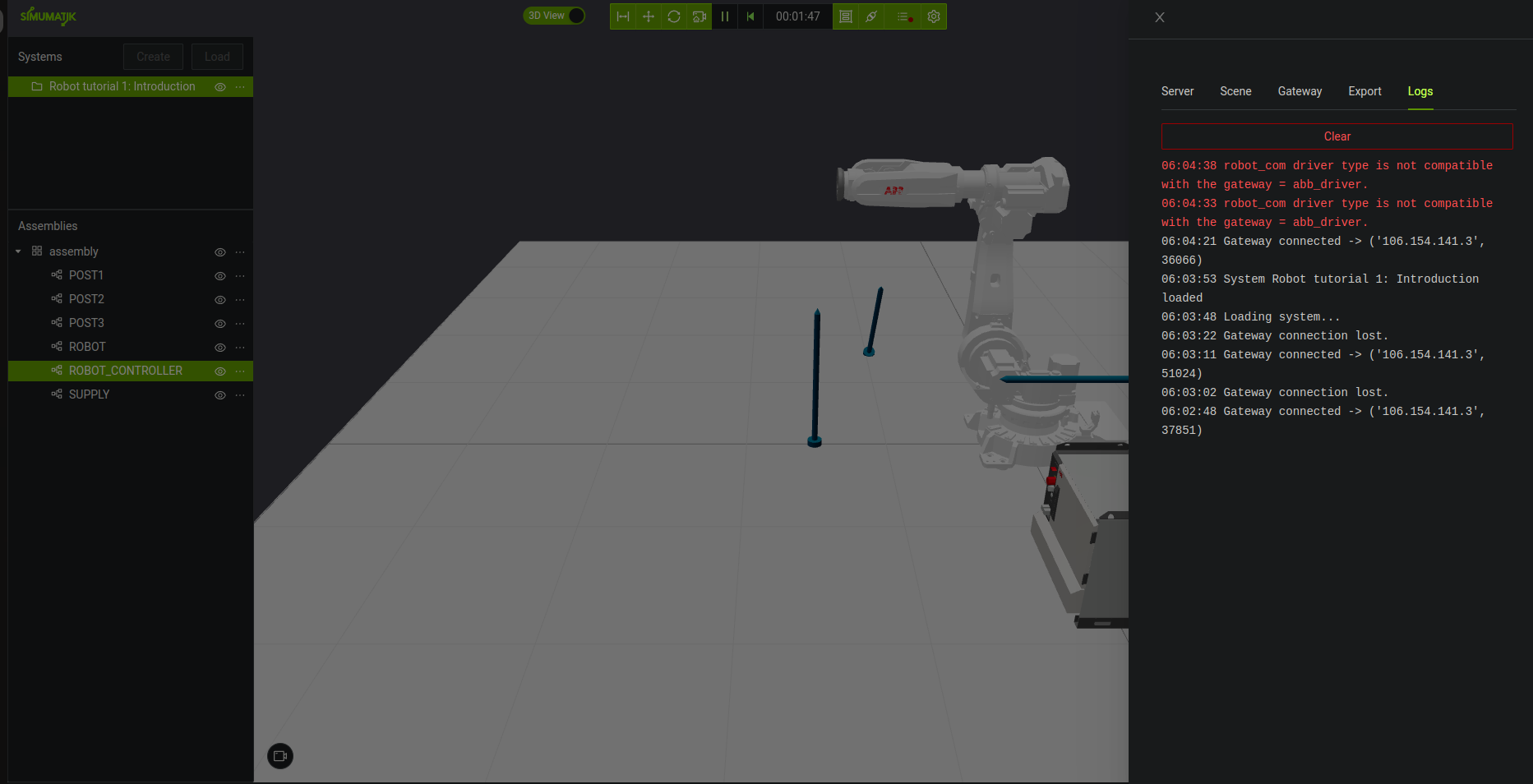
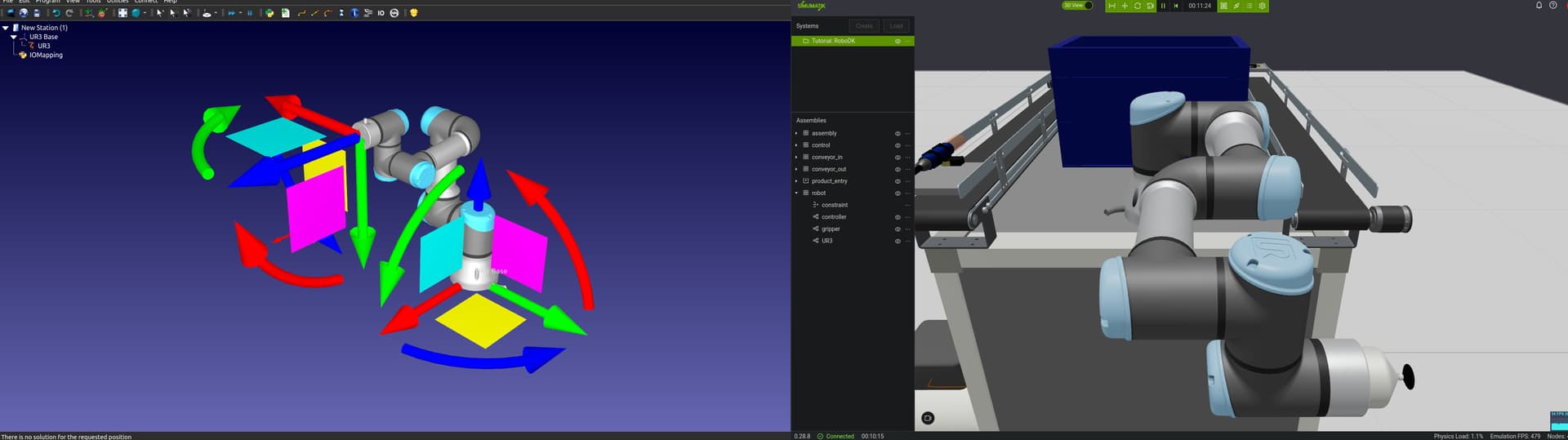
But I can’t get the UR3 to work manually. What could be the reason for this?
OS: Ubuntu 22.04
Python3.8.16
I’m trying RoboDK, Integration.
https://academy.simumatik.com/courses/robodk-integration/module/integration-setup-3/
But I can’t get the UR3 to work manually. What could be the reason for this?
OS: Ubuntu 22.04
Python3.8.16
Hi,
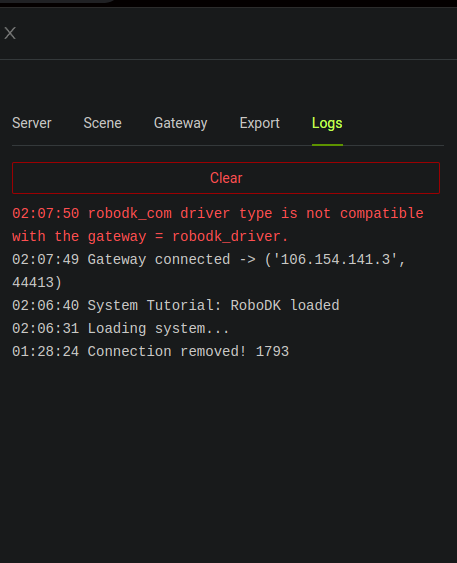
The RoboDK driver is only implemented for windows. Do you have the possibility to try it in a windows machine?
Cheers,
Fabian
Hi again,
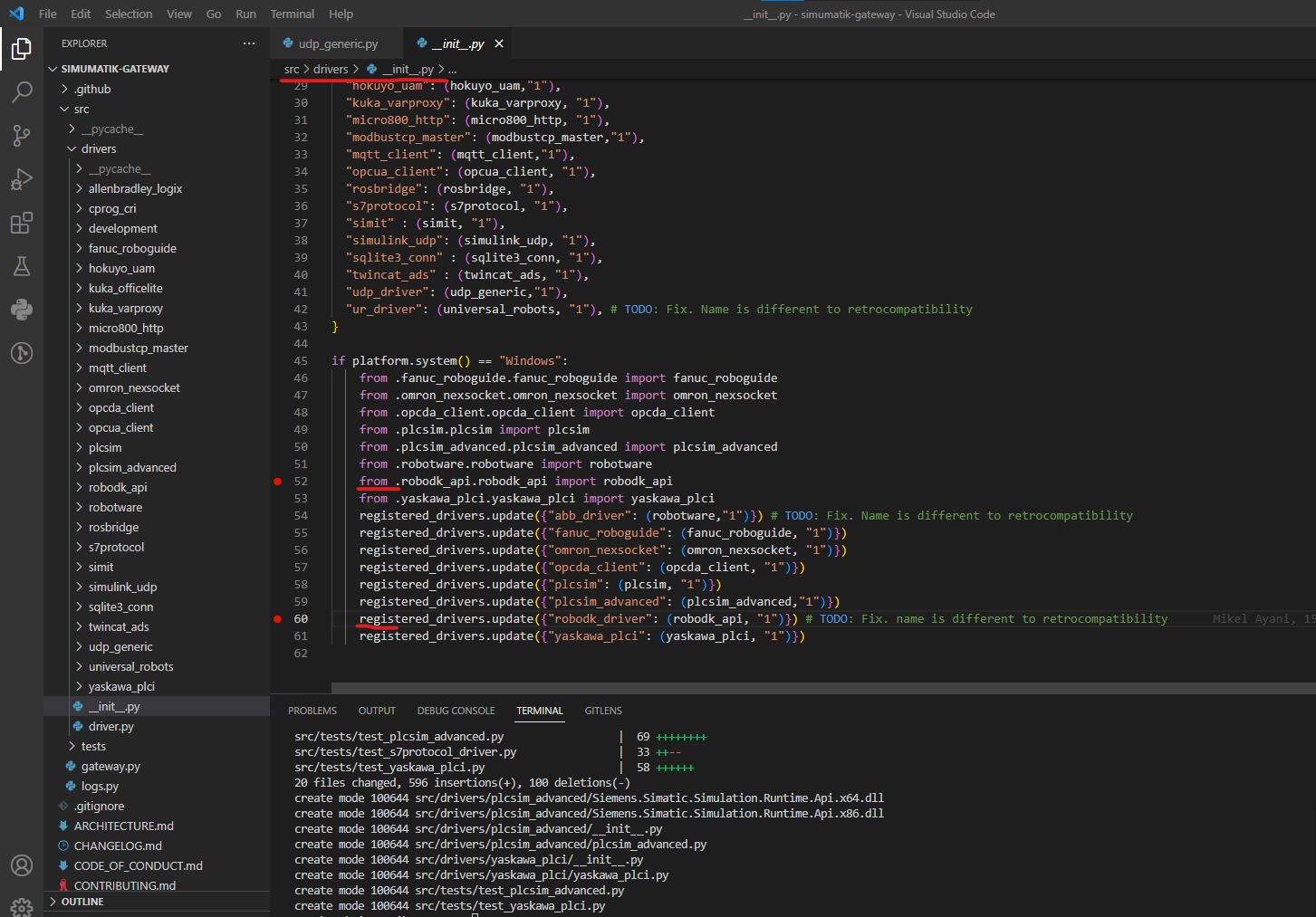
I just realized that you are probably running the gateway from the code? If you move line 52 and 60 to outside of the if-statement, it should be working, but not tested and supported.
Hi,
The suggested method made simumatik work on Ubuntu. The breakpoint line is the modified part. However, if I make a mistake in the procedure, it may not work. I would really like simumatik to work on Linux as well as Windows.
RoboDK alone works on Linux, but RoboDK and simumatik combined doesn’t work on Linux, I understand. I primarily use Linux, but can also use Windows. Which is better, Windows 10 or Windows 11?
Hi,
We could merge that change and deploy a new version of the gateway. I’ll let you know when it’s deployed.
For Simumatik, the difference between win10 and win11 does not matter, it works for both.
Cheers,
Fabian
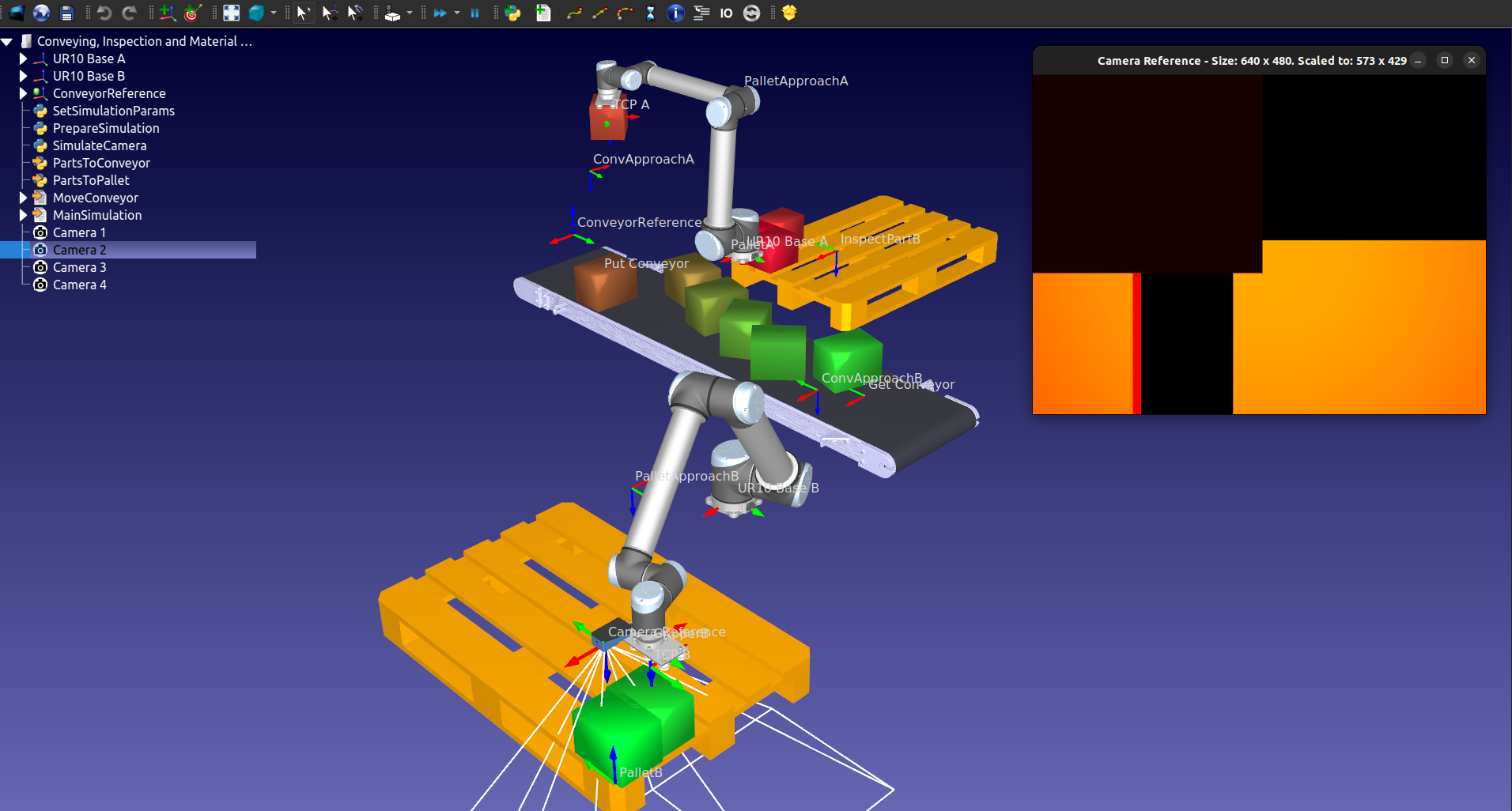
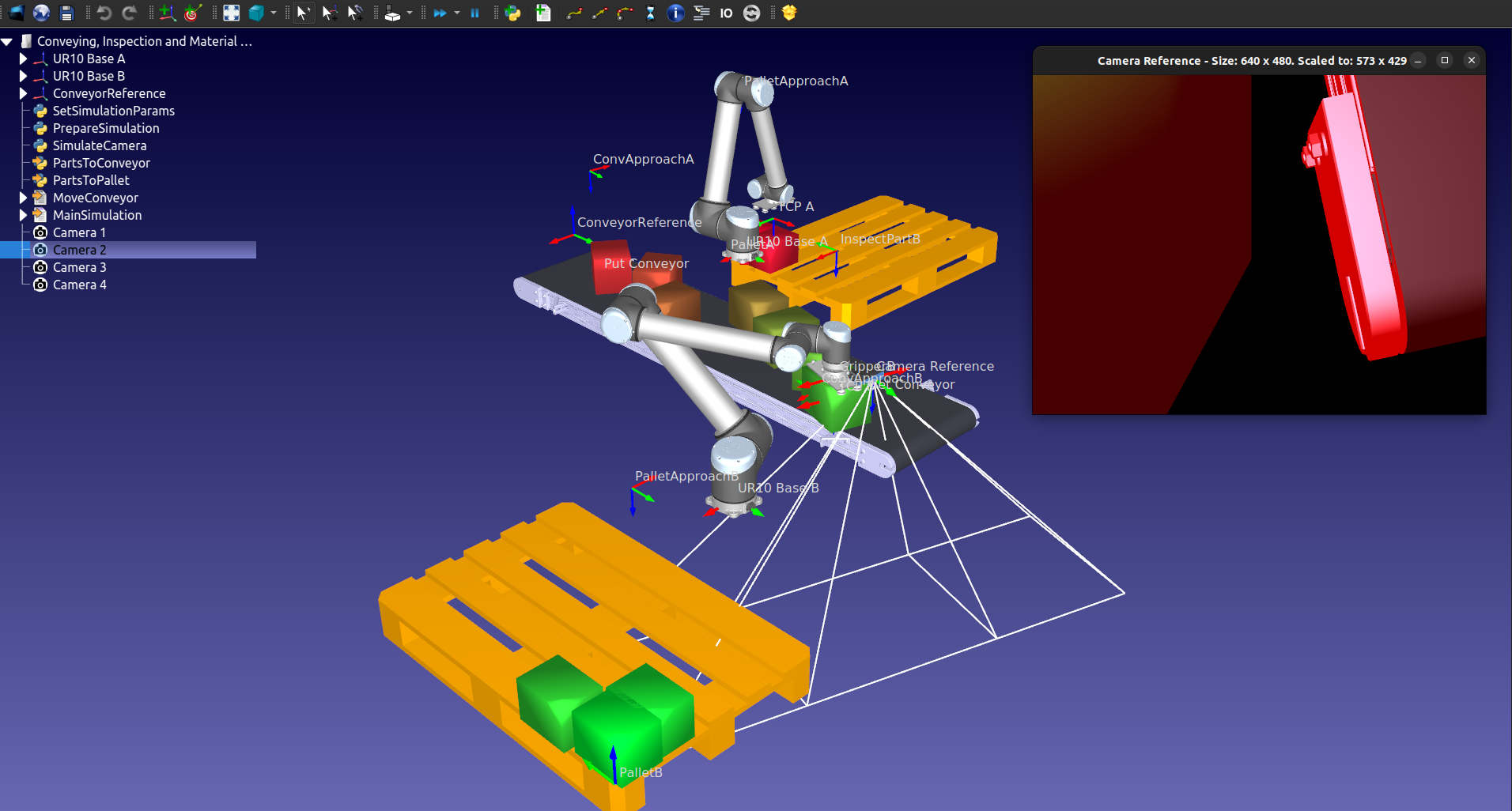
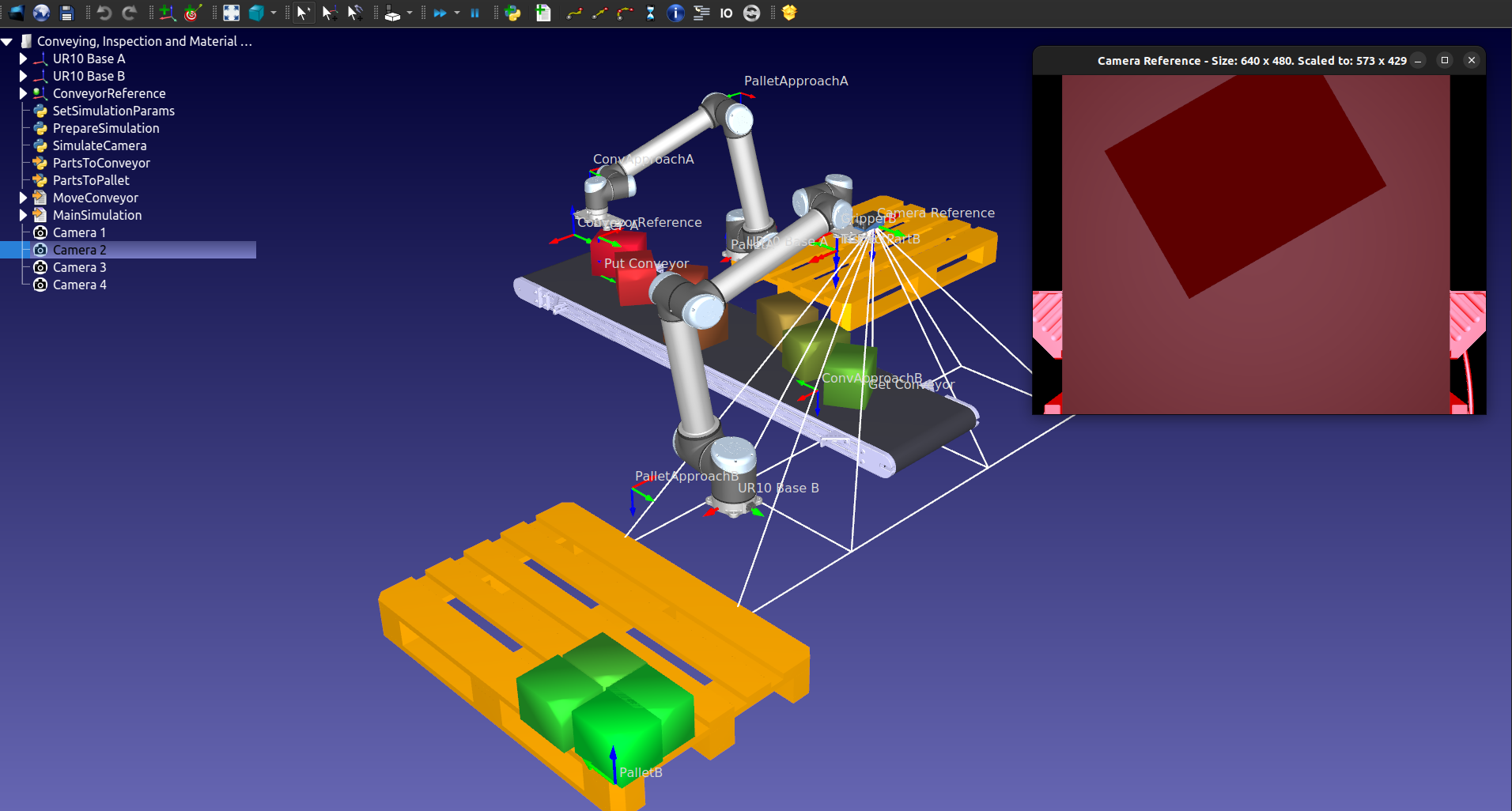
Is it possible to simulate using a camera like the attached video on Simumatik?
Is it possible to display the camera image on simumatik and transfer the image to the RoboDK?
Hi Sat,
Our camera possibilities is described here in the manual Camera Views - User Manual
Some limitations,
The camera is static and cannot be moved by the robot.
Only one camera at the time can be used to take snapshots.
Come to think of it, I didn’t see an example using machine vision.
It is a request, I would like simumatik to be able to simulate multiple machine visions.
How about emulating the camera of Basler, which has a large camera share?
Hi.
We are working on doing a public tutorial on how to emulate Machine vision, with a CodeSys PLC and a Python script running Open-CV emulating the camera, there is going to be a live webinar recorded and streamed on youtube, explaining how to set it up and run the emulation. This is planned to be in 2-3 weeks. We only have a private system and a document explaining that system. Follow the Youtube channel to get updates on that webinar.
Multiple cameras are in the pipeline, and will hopefully be implemented and deployed later this year.
By using this way to save images and being able to read in Python we don’t limit ourselves to a separate maker och vision system but could emulate whatever camera is needed. We do consultancy projects to develop such rich emulations of particular components.
I hope this gives the answer you need.
Cheers,
Fabian
I’m going to watch that Youtube video!
Then inquire about it.
On a different note, is RoboDK required for simumatik? Naturally, simumatik alone is easier to deal with when trouble occurs.