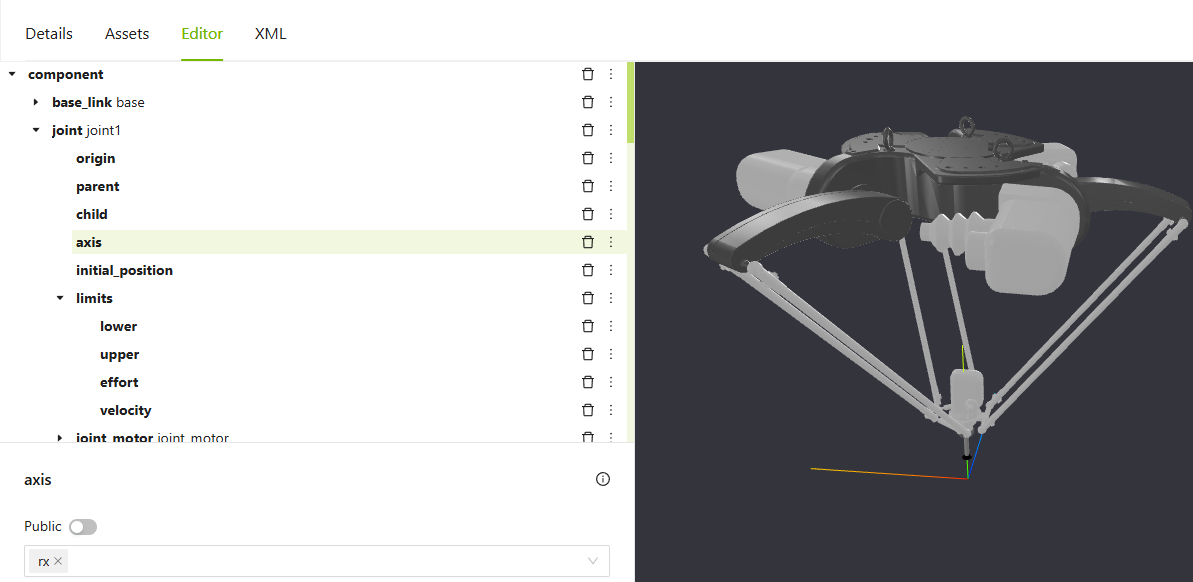
I’m currently trying to import a spider robot into simumatik. How to set the rotation axis for the robot? And how can I know which joint and link do I set for each one?
Interesting project! Do you already have all the 3D parts?
It is not very complicated to build this robot, but I don’t know how good it will perform.
Anyway, the trick is to offset the joint origins to match the 120 degrees.
You have the base link for the top part, two links for each arm, and 2 more links for the bottom part to get the rotation.
I could create a draft and share it if you tell us the exact model.
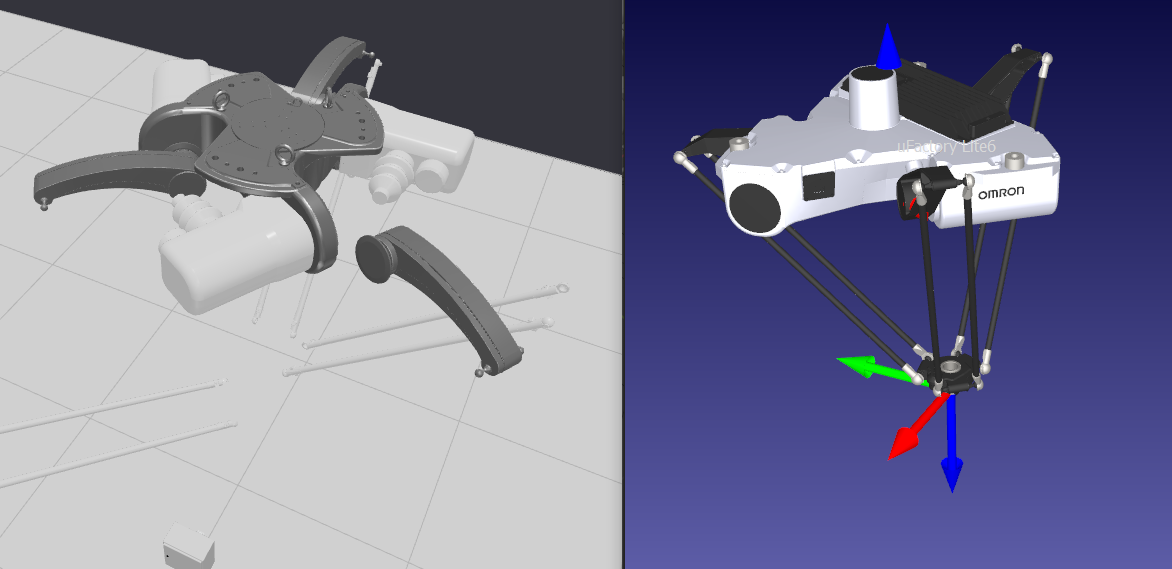
The model is Omron R6Y3. I have linked the arm part to the base part but if I moved the robot in robodk the rotation axis is as previous image.
How is this topic? I am also interested.