Hi, I’m trying to practice this course and I’m having some problems to get the in02 signal from the gripper, I’ve studied the gripper’s behavior program and so far it seems that if I want the gripper to generate anoutput signal, I need to satisfy some conditions. the problem is how can I make the below input variable to be true when I was teaching the robot? and what is the the logic behind it? thank you!
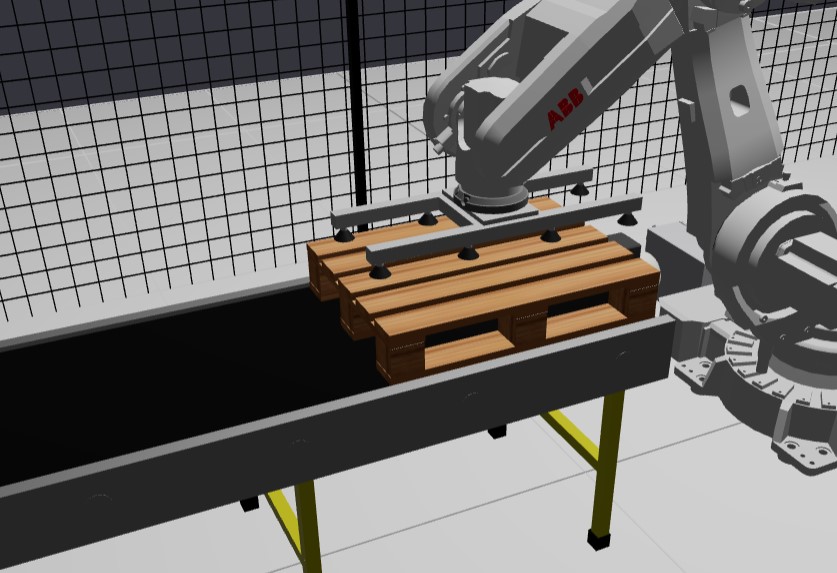
Hi, the code you included checks if the locker is currently enabled and locked onto something. To get a 24V signal from the signal port, first make sure that the gripper tool is positioned close to an object that it can pick up, and then give it an input pressure to enable it. If the gripper successfully locks on to the object the signal will get activated.
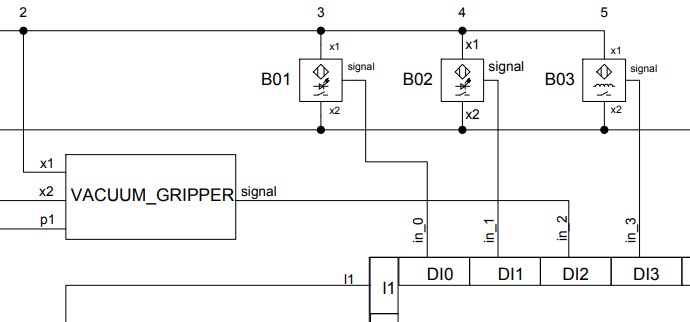
By default, that signal is connected to port in_3 in the controller.
Thank you for your reply, I have changed in_2 to in_3 in the program. first of all I just rely on the drawing in the programming and ignore the actual connection of the system, but from the drawing the signal of the gripper is to in02, maybe you need to do an update, secondly my logic is to move the gripper near the workpiece position and then set out_1 in the program, but in this case in_3 is not activated,so I tried to manually adjust the Z-position of the gripper downward while watching the I/O system to see if in_3 was lit until the gripper interfered with the collision area of the workpiece, but in_3 was still not activated. According to the virtual design logic of the gripper, when “set out_1” was executed and the gripper is close enough to the workpiece, the following logic should be satisfied, but why in_3 can not be actived and in which sitiation the lock status will be true?
p1_pressure>4 and x1_voltage[0]-x2_voltage[0]>20:
p1_flow = n_flow
enable = True
Good catch, thanks for pointing that out! We will update the circuit diagram to match the connections in the system.
The way this component is programmed now it’s important that the gripper is in the right position before actually activating the vacuum. Moving it down while the signal is active won’t make it grip the pallet unless the signal is shortly disabled and then enabled again.
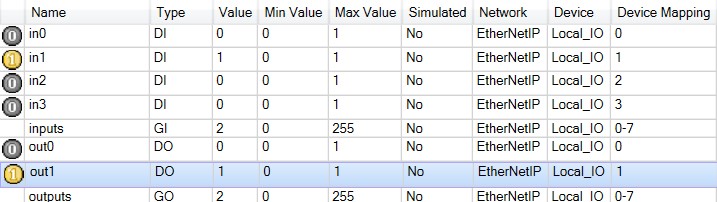
If this still doesn’t solve the problem, try to monitor the values in the ports by pressing the “eye” icon next to the port to make sure that the gripper actually gets a pressure in the p1 port for example.
Hi again Kim, we noticed that the public version of that gripper was outdated and had an issue with the collision shape. The new version has been published now (which is the one I was using in the video in the earlier post). Thanks for letting us know, and sorry for the inconvenience.
hello Aron,thanks for your update, I have successfully completed the test with the new system, I also made a mistake that “set out1” is activated before the robot reach the right position, after adjusting the zone value from “z10” to “fine” and then successfully grasp the workpiece, the actual project requirements are almost the same, very nice!